Wirkungsgrad-Optimierung der PMSM & IPM
Der permanentmagnet-erregten Synchronmaschine PMSM wird oft ein guter Wirkungsgrad zugeschrieben. Da durch die Permanentmagnete keine elektrische Erregerleistung erbracht werden muss, entstehen sicherlich geringere ohmsch Verluste in der Ständerwicklung da dieser Anteil in der zugeführten Leistung fehlt. In vielen Anwendungen wird der Motor jedoch in einem für die PMSM ungünstigen Betriebspunkt betrieben:
a) niedrige Drehzahl und hohes Moment
b) hohe Drehzahl bei kleinem Moment (Teillastbetrieb) und das über lange Zeit
Wegen der hohen Vormagnetisierung der Permanentmagnete entstehen bei hohen Drehzahlen hohe Um-magnetisierungs-Verluste und Wirbelstrom-Verluste auch wenn kein oder wenig Drehmoment abgegeben wird.
Die Eisenverluste dominieren und trotz geringer Kupferverluste bleibt der errechenbare "Wirkungsgrad" weit hinter den Erwartungen.
Dieser Sachverhalt bringt den Antriebstechniker in einen Konflikt: Überwiegen in einer Anwendung die Eisenverluste des Motors und beeinträchtigen den Wirkungsgrad maßgeblich, so führt Überdimensionierung zwangsläufig zu einer weiteren Verschlechterung, weil STATIC FRICTION und VISCOUS DAMPING mit der Rotorlänge und Baugröße steigen.
Derzeit beschäftigen sich viele Antriebs-Spezialisten mit diversen Regelungsverfahren zum Thema "Wirkungsgrad-Optimierung von Antrieben". Eine tagelange Internet-Recherche hat gezeigt, dass diesbezüglich eine Vielzahl an Möglichkeiten untersucht, und durchaus interessante Ansätze verfolgt werden.
Als unverzichtbar - hat sich die Temperatur-Nachführung der Wirbelstrom-Verluste WSV - gezeigt.
Die hier vorgestellten Optimierungsverfahren verbessern den Wirkungsgrad nur leicht, bestechen aber wegen ihrer einfachen Umsetzbarkeit:
- lastabhängige Kommutierungswinkel-Manipulation MTPA kann in jedem handelsüblichen Servoregler einfach realisiert werden
- sinnvoll bei PMSM mit Oberflächenmagneten
- sinnvoll bei IPM mit vergrabenen Magneten
- Feldschwächung für Servomotoren in Teillast bei hohen Drehzahlen
Feldschwächung für Servomotoren in Teillast bei hohen Drehzahlen
Bevor man mit der Implementierung einer Wirkungsgrad-Optimierungs-Maßnahme startet, sollte man die Voraussetzungen überprüfen.
Überprüfung der Voraussetzungen:
- Der Servomotor sollte ein Gewicht von > 8 kg haben. Bei Motoren < 5 kW überwiegen die Kupferverluste deutlich den Eisenverlusten und der Strom zur Feldschwächung (negativer ID), erzeugt höhere ohmsche Zusatz-Verluste als die Eisenverluste durch die Schwächung des Feldes zurückgehen. (für n < 6000 RPM)
- Insbesondere tritt bei Motoren mit Oberflächenmagneten bei Feldschwächung eine erhebliche Feld-Deformation auf. Es entstehen Oberwellenanteile, die eine Zunahme der Verluste (Wirbelstromverluste) verursachen. Der gewünschte Optimierungs-Effekt bleibt aus.
- Betreiben Sie den Motor zunächst im Leerlauf bei der gewünschten Betriebsdrehzahl und messen Sie die sich einstellende Temperatur. Danach schwächen Sie durch einen negativen Feldschwäch-Strom ID das Feld der Magnete um ca. 6%. Geht die Temperatur zurück, dann können Sie starten:
Suche nach dem Wirkungsgrad-Optimum:
Das Optimum des Wirkungsgrades in Abhängigkeit der Feldschwächung liegt dort, wo
- die Zunahme (Steigung [V]) der CU-Verluste durch den zusätzlichen Längs- und Querstrom gleich der Abnahme (Steigung [V]) der Eisenverluste durch Feldschwächung ist. Beziehungsweise
- die Ableitung [V] der Summe aller Verluste = Gesamtverluste NULL ist. Oder auch die Summe aller Ableitungen NULL ergibt. Und damit
- die Gesamtverluste ihr Minimum aufweisen.
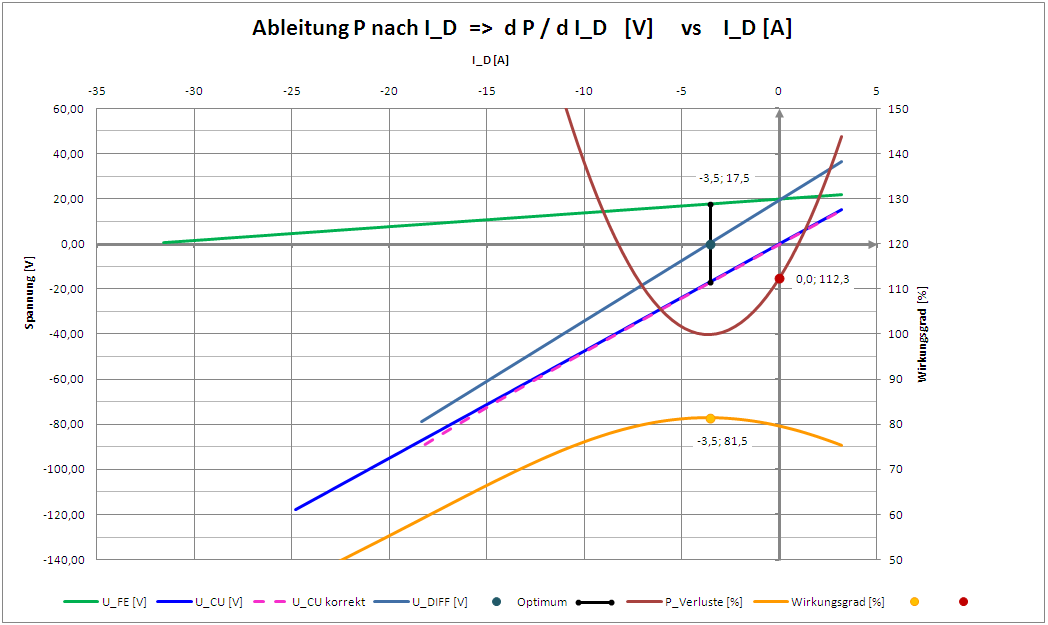 Ableitung P nach ID
Ableitung P nach ID
Die Gesamtverluste können, abhängig von den Eingangs-Parametern, um bis zu ~15% zurückgehen. Beispiel hier 12,3 %. Der Wirkungsgrad verbessert sich leicht um ca. 0,5 - 1,5 %.
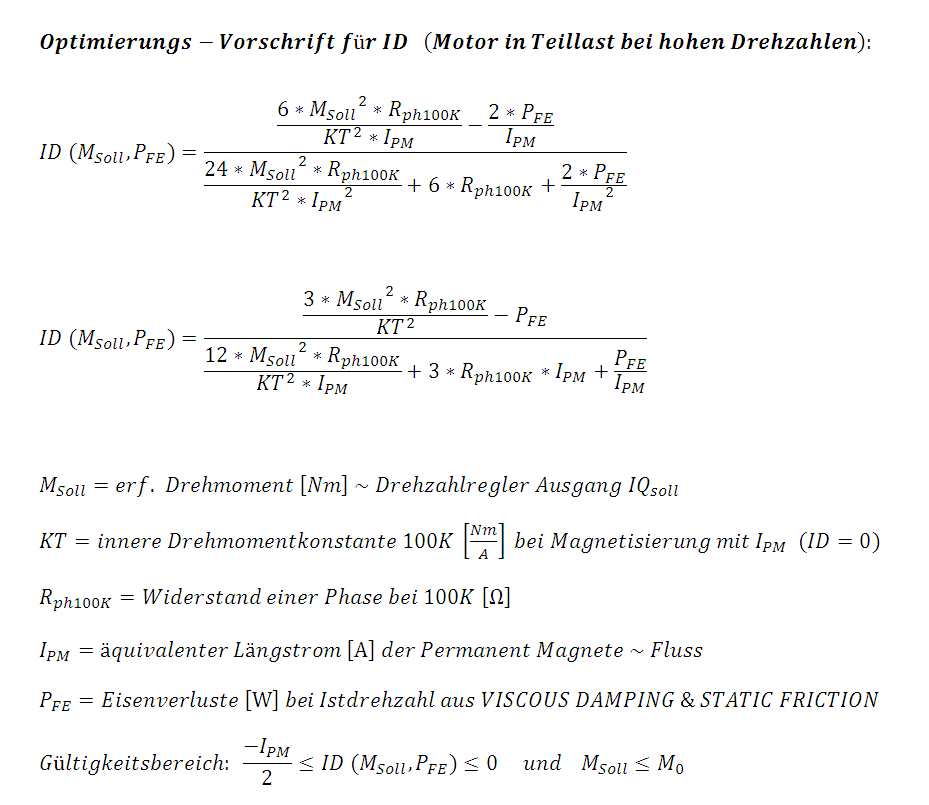
Optimierungs-Vorschrift für den Feldschwäch-Strom ID:
Löst man die Ableitungen und stellt das Ergebnis nach ID um, dann erhält man folgende Optimierungsvorschrift:
 Optimierungs-Vorschrift für ID Motor in Teillast.PNG
Optimierungs-Vorschrift für ID Motor in Teillast.PNG
Die Eingangs-Größen sollten mit der Motortemperatur nachgeführt werden. Hierzu sind aber alle Temperaturabhängigkeiten zu bestimmen. Für den ohmschen Widerstand (R) und die Drehmomentkonstante (KT) ist das noch relativ einfach. Die Ermittlung des Einflusses der Temperatur auf die Eisenverluste (P FE = P MV + P WSV) und der Einfluss auf die Magnete (I PM) selbst, sind allerdings aufwendig. Siehe hierzu Wirbelstrom-Verluste.
Hinweis I PM (äquivalenter Längsstrom):
I PM ist eine Rechengröße und steht für den Effektiv-Strom, der in der Ständerwicklung in positiver Feldrichtung (positiver ID) fließen müsste, um den (Effektiv-) Fluß der PM-Magnete zu erzeugen.
Verhalten der Optimierungs-Vorschrift:
In Abhängigkeit des Soll-Querstroms [A] ~ angefordertes Moment [Nm] am Drehzahlregler-Ausgang, ergibt sich folgendes Verhalten:
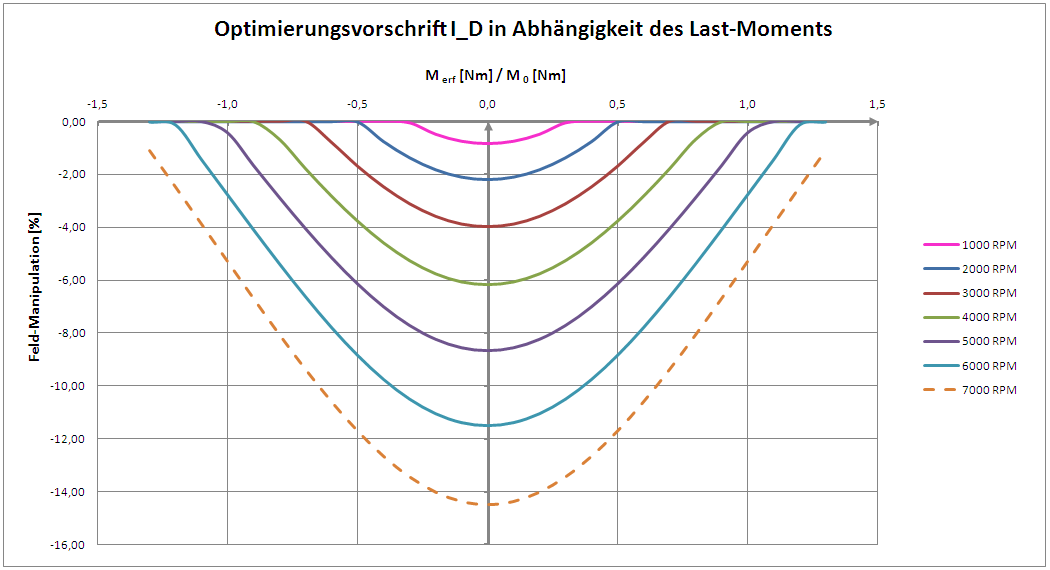 Optimierungsvorschrift I_D in Abhängigkeit des Last-Moments
Optimierungsvorschrift I_D in Abhängigkeit des Last-Moments
In Abhängigkeit der aktuellen Drehzahl [RPM] liefert die Optimierungs-Vorschrift folgendes Verhalten:
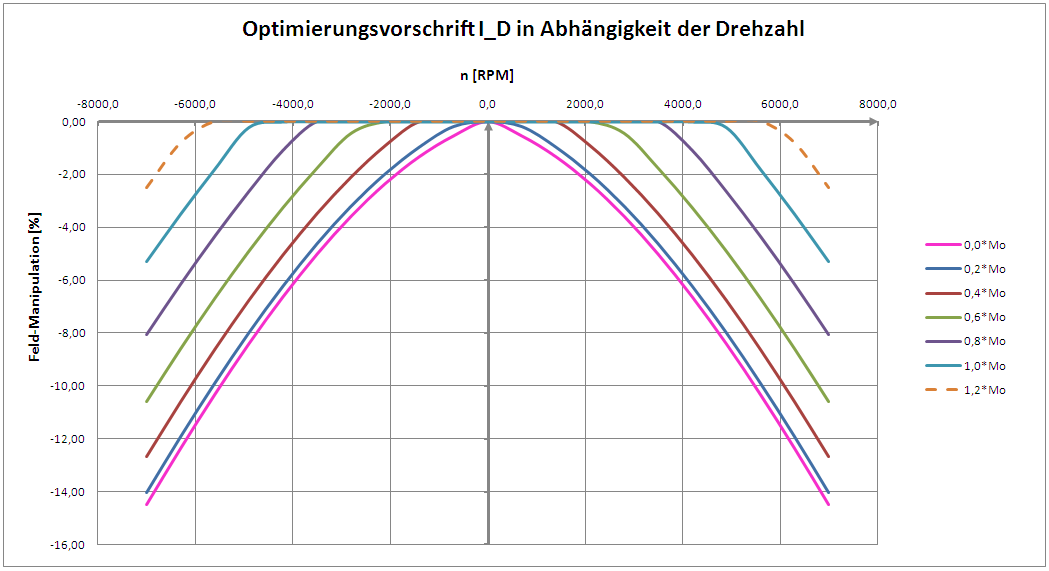 Optimierungsvorschrift I_D in Abhängigkeit der Drehzahl
Optimierungsvorschrift I_D in Abhängigkeit der Drehzahl
Die Auswirkung der Feldschwächung auf den Wirkungsgrad und die Gesamt-Verluste können Sie am Beispiel oder durch Eingabe Ihrer Motorparameter mit beiliegendem Tool durchspielen:
Drehzahl-Drehmoment-Kennlinie V4.xx.xlsm
Optimierungs-Vorschrift im Regelkreis:
Die Optimierungs-Vorschrift lässt sich in die vorhandene Regel-Struktur einbinden:
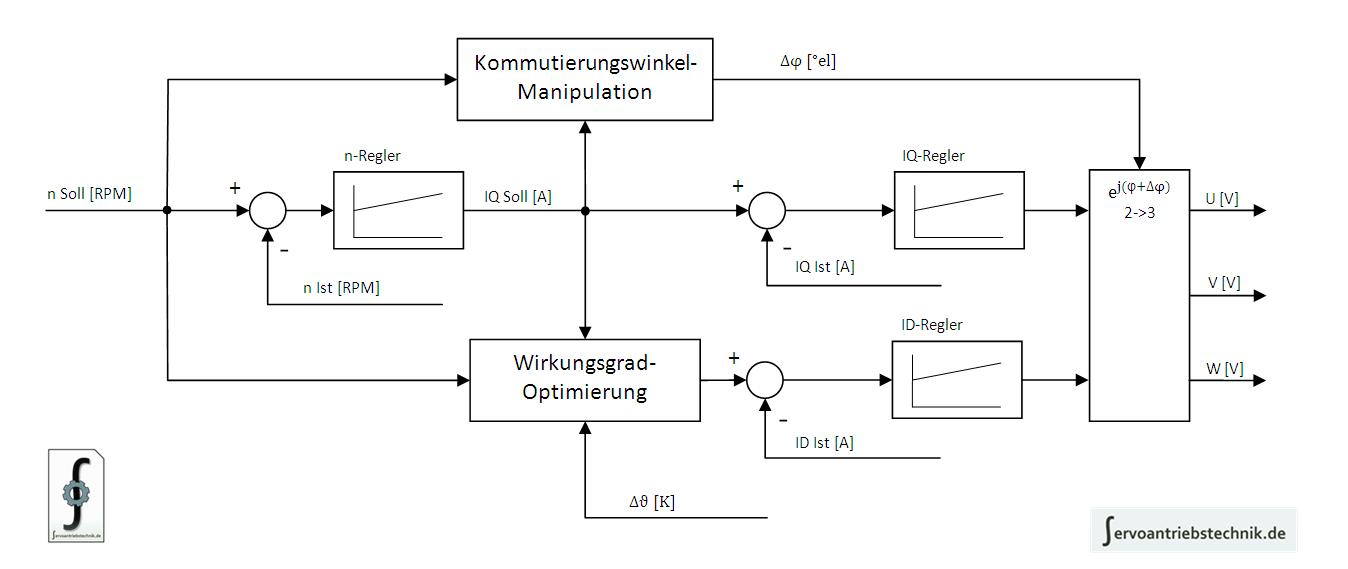 Wirkungsgrad-Optimierung im Regelkreis
Wirkungsgrad-Optimierung im Regelkreis
Motoren mit SALIENCY = LD / LQ > 1
Die Optimierung-Vorschrift liefert auch positive Werte (Feld-Verstärkung). Für Motoren LD / LQ <= 1 macht eine Überhöhung des Feldes in der Regel keinen Sinn. Positive Ergebnisse der Optimierungs-Vorschrift sind zu ignorieren.
Für spezielle Rotor-Konstruktionen, die eine Vorzugsrichtung in D-Längs-Richtung aufweisen (LD / LQ > 1), kann die Feld-Erhöhung genutz werden, insbesondere dann, wenn die Magnete zur Wirkungsgrad-Optimierung im Teillast-Bereich und Leerlauf um ca. 15-30% unterdimensioniert wurden.
09.08.2017 Roland Fetzner