2-Massen-Beobachter
Das Wichtigste zuerst:
Ziel des 2-Massen-Beobachters ist, die Soll-Position des Motors (Masse 1) so zu manipulieren, dass die Lastmasse (Masse 2) der gewünschten Trajektorie folgt.
Ohne diese Manipulation, werden mit zunehmender Proportional-Verstärkung des Lage-Regelkreises etwaige Maßnahmen im Drehzahl-Regelkreis unwirksam, weil der Motor zunehmend der Original-Trajektorie folgt und die Lastmasse, wie bekannt, elastisch gekoppelt folgt. *)
Drei verschiedene Gedankenansätze, aber nur eine Lösung:
- Ansatz: Die Soll-Position und die Soll-Drehzahl des Motors wird derart manipuliert, dass die Lastmasse der gewünschten Trajektorie folgt. Die Regelkreise werden über die Ist-Position und Ist-Drehzahl des Motors geschlossen. Die Sollwert-Manipulation ist die Addition der Positions- bzw. Geschwindigkeitsdifferenz zwischen Motor und Last auf die jeweiligen Sollwerte.
- Ansatz: Die Ist-Position und die Ist-Drehzahl des Motors wird derart manipuliert, dass die Lastmasse der gewünschten Trajektorie folgt. Die Regelkreise werden über die Ist-Position und Ist-Drehzahl des Motors geschlossen. Die Istwert-Manipulation ist die Subtraktion der Positions- bzw. Geschwindigkeitsdifferenz zwischen Motor und Last von den jeweiligen Istwerten.
- Ansatz: Die Regelkreise werden über die geschätzten (estimated) Ist-Werte der Last des Observers geschlossen. Würde der Observer optimal arbeiten, dann entsprechen diese geschätzten Ist-Werte gerade der Istwert-Manipulation aus Ansatz 2. Der Ansatz 3 hat aber einen entscheidenden Nachteil: Die Regelkreise dürfen erst geschlossen werden, nachdem sichergestellt ist, dass der Observer gut parametriert ist und sinnvolle Schätz-Ergebnisse liefert. Bei Ansatz 1 und 2 hingegen, kann man den Einfluss des Observers schrittweise verändern (0-100%) und ausschalten, weil die Regelkreise immer über das Motorfeedback geschlossen sind. Das erleichtert die Inbetriebnahme und die Optimierung deutlich.
Simulation:
Hier die Simulation eines 2-Massen-Beobachters mit Manipulation über die Vorsteuerung im Lage- und Drehzahlregelkreis nach Ansatz 1:
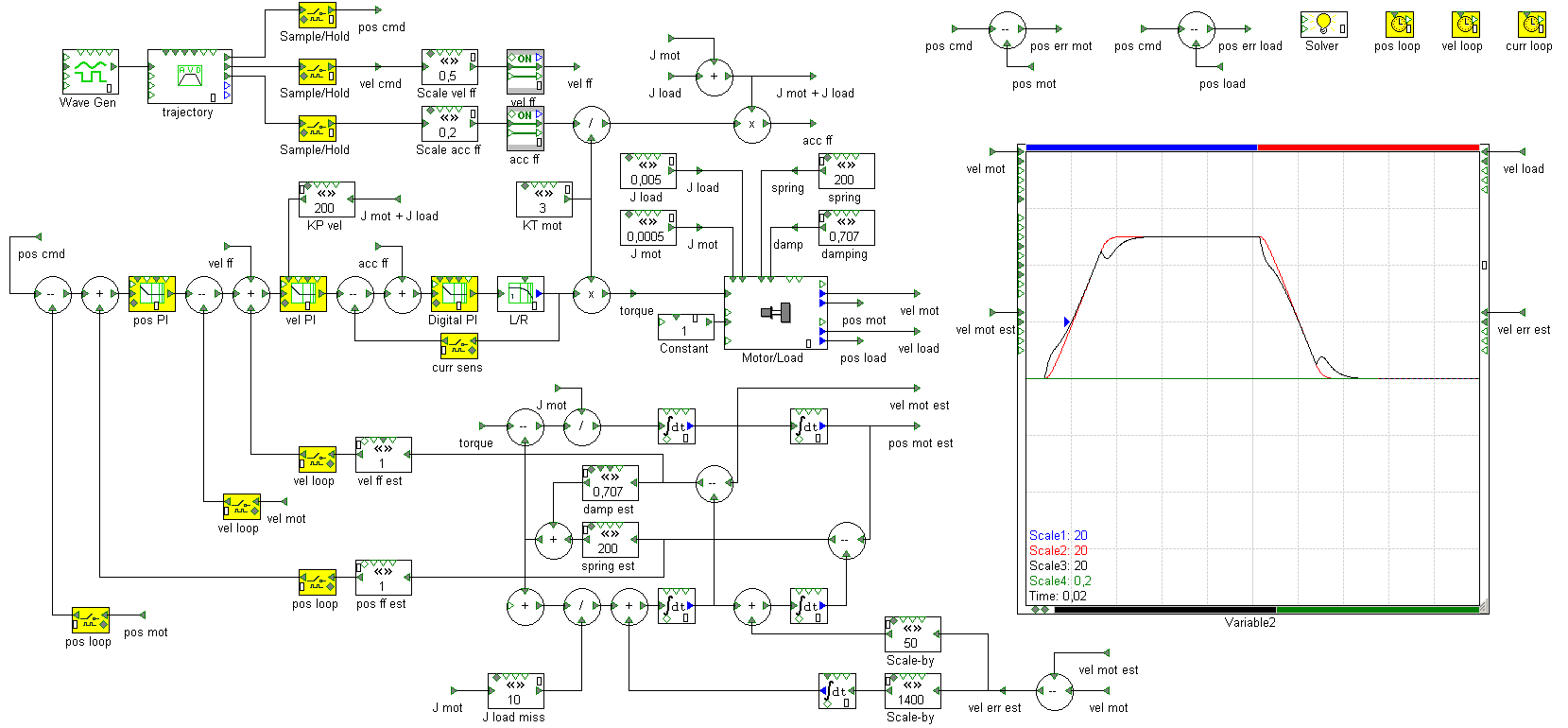 2-Massen-Beobachter V11
2-Massen-Beobachter V11
Anmerkung:
Die Bandbreiten der Regelkreise sind zwangsläufig unterschiedlich. Es ist immer zu prüfen, ob die Kaskade, die Aufgabenstellung überhaupt lösen kann. Wichtig ist, dass der Observer in der schnellst möglichen Task läuft.
Glücklicherweise sind bei hohen Resonanzfrequenzen eines 2-Massen-Systems die Amplituden klein und die Positionsabweichung gering. Bei niedrigen Frequenzen < 10 Hz ist der Positionsfehler meist groß und störend, so dass Abhilfe-Maßnahmen getroffen werden müssen. Hier reicht die Regler-Bandbreite meist aus.
Erkenntnisse aus den Simulationen mit 2-Massen-Beobachter:
- ändern sich die Parameter des realen Systems im Betrieb, liefert der Beobachter schlechtere Ergebnisse. Wird der 2-Massen-Beobachter nach Ansatz 1 oder 2 nur anteilig zugeschaltet, ist das Ergebnis dennoch besser und die Schwingneigung deutlich reduziert.
- Treten keine externe Stör-Kräfte bzw. Stör-Drehmomente auf, so hat während der Beschleunigungs- und Bremsphase die Manipulation des Positionswertes auffällige Ähnlichkeit mit der Beschleunigung. Machen wir uns bewusst, dass die Manipulation in der Position gerade den Winkelversatz zwischen Motor und Last darstellt. Wir sprechen vom Torsionswinkel. Torsionswinkel = Beschleunigung Last * Trägheit Last / Steifigkeit. Arbeitet der Observer optimal, ist die Beschleunigung der Last gleich die der Trajektorie! Deshalb macht es Sinn über eine Torsionswinkel-Vorsteuerung nachzudenken.
Fußnote *) = Lageregelkreis über Positions-Istwert des Motors geschlossen.
25. Februar 2018
Roland Fetzner