Elastisches Maschinenbett actio = reactio
Maschinenteile lassen sich oft nicht mit der gewünschten Steifigkeit aufbauen. So stützen sich Antriebsmechaniken oft an Maschinen-Elementen ab, die selbst elastisch sind und nachgeben, sobald die zu bewegende Masse beschleunigt oder abgebremst wird.
Vereinfacht lässt sich das Problem darstellen am Beispiel "Linearmotor auf einem wackeligen Tisch":
 Störgrösse elastisches Maschinenbett
Störgrösse elastisches Maschinenbett
Abgrenzung zum klassischen 2-Massen-System:
- Beim 2-Massen-System soll der Motor beide Massen M1 und M2 antreiben, wobei eine der Massen der gewünschten Trajektorie folgen soll. Meist soll M2 der gewünschten Trajektorie folgen obwohl das Lage-Feedback an M1 gemessen wird. Hier soll nur M1 der Trajektorie folgen aber der gemessene Weg entspricht nicht dem Weg zum Ziel, weil der Offset Δs (=Nachgiebigkeit Tisch bzw. die aktuelle Auslenkung) das Bewegungsgesetz überlagert.
- Im 2-Massen-System sind die beiden Massen über die Steifigkeit miteinander gekoppelt. Im jetzt betrachteten Fall, legt die Proportional-Verstärkung des Lageregelkreises die Steifigkeit zwischen Läufer und Stator fest und ist somit Abhängig von der Reglereinstellung. Die Steifigkeit des Tischs lässt sich nicht beeinflussen.
Maßnahmen gegen Schwingungen:
- Tisch-Masse M2 vergrößern (Granitblock)
- Trajektorien mit ruckfreien Übergängen wählen, die Schwingneigung wenig anregen
- Tisch-Nachgiebigkeit und Auslenkungs-Geschwindigkeit schätzen und Soll-Trajektorie manipulieren.
Aufschaltung (feed forward ff) einer geschätzten Störgröße auf die Trajektorie:
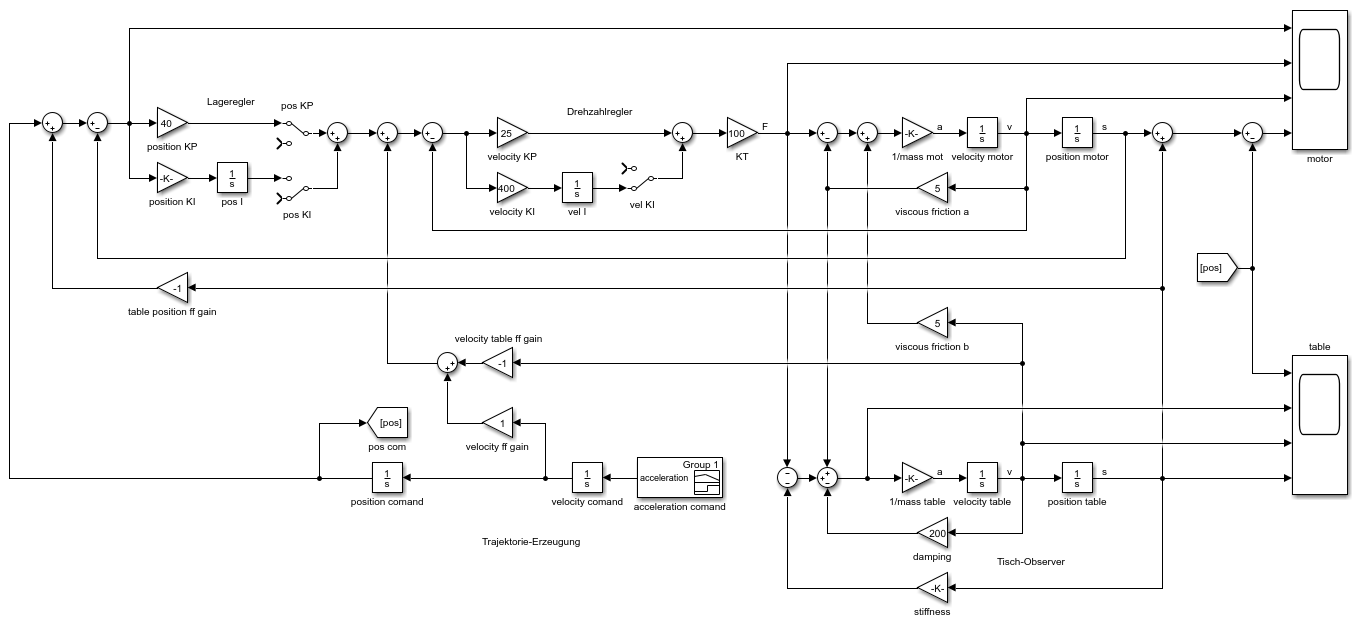 Regelung elastisches Maschinenbett
Regelung elastisches Maschinenbett
Ergebnisse der Simulation:
 Simulation Regelkreis
Simulation Regelkreis
Durch die Aufschaltung lässt sich erreichen, daß der Läufer der gewünschten Trajektorie folgt. Das Bild unten links zeigt die Positionsabweichung des Läufers gegenüber der Soll-Trajektorie in X-Richtung im ortsfesten Koordinaten-System.
Hinweis 1:
Ist zu erwarten, daß sich Masse M2, Steifigkeit und Dämpfung im Betrieb ändern, so können die Observer-Parameter für den Tisch nachgeführt werden. Ist eine Nachführung nicht möglich, kann die Einbindung eines Beschleunigungs-Sensors evtl. eine preisgünstige Lösung darstellen.
Hinweis 2:
Das vorgestellte Regelverfahren ist KEINE aktive Schwingungs-Dämpfung, sondern lediglich der Versuch den Störeinfluss der Tisch-Dynamik zu kompensieren.
Download:
Das SIMULINK-Model steht zum download bereit:
Stoergroesse_Maschinenbett_V008.slx
12.01.2022 Roland Fetzner