Polynom 7. Ordnung
Das 2-Massen-System am Beispiel einer Zahnriemen-Achse:
 2-Massen-System Zahnriemen-Achse
2-Massen-System Zahnriemen-Achse
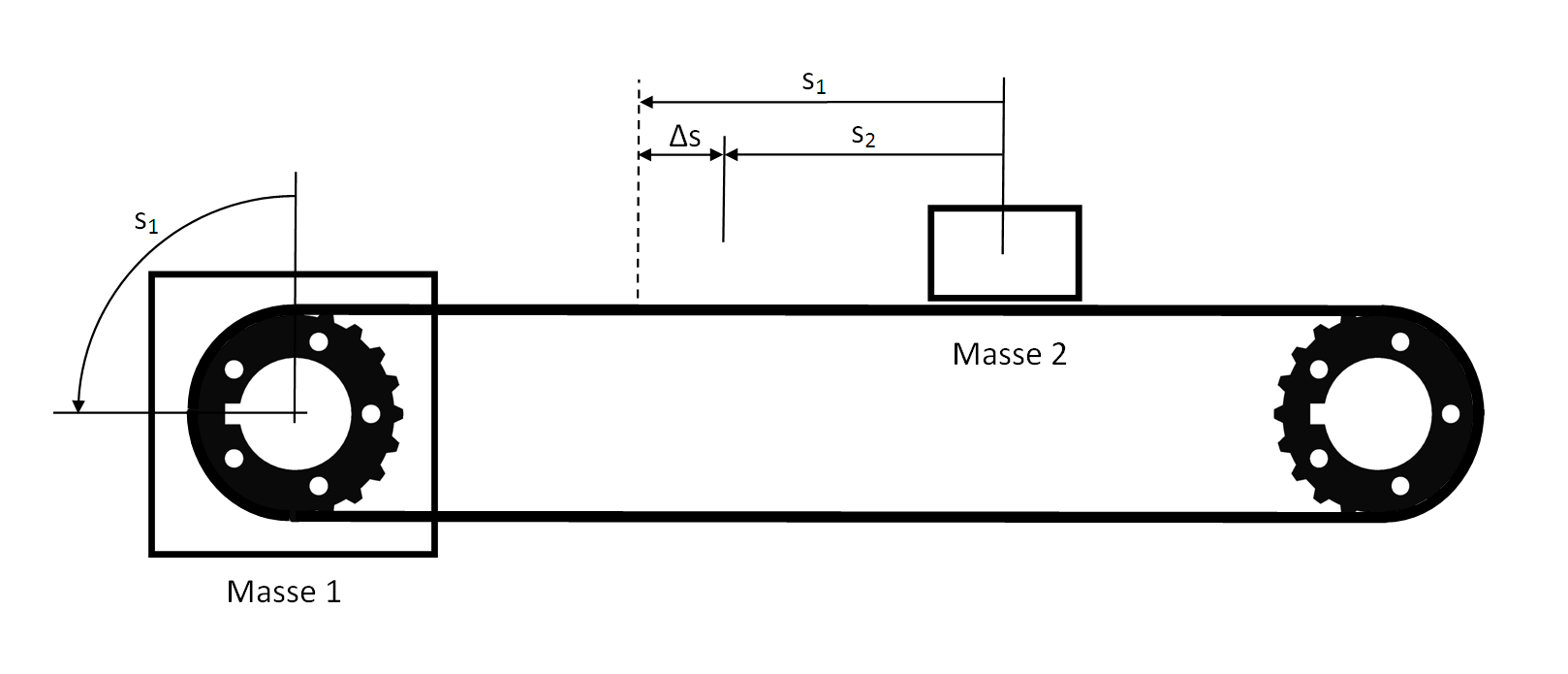
Abbildung: 2-Massen-System Zahnriemen-Achse
Während der Beschleunigung dehnt sich der Zahnriemen um die Länge Δs. Die Trajektorie für den Motor kann um diese Differenzlänge (Dehnung / Torsionswinkel) manipuliert (vorgesteuert) werden. Daraus ergibt sich eine Mindest-Anforderung an das Bewegungsgesetz:
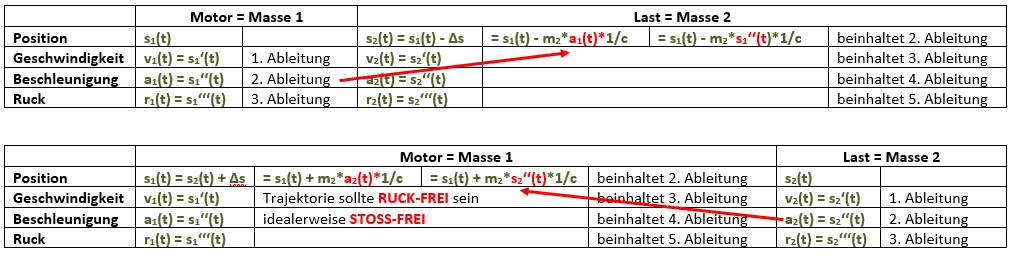 Anforderung an die Trajektorie
Anforderung an die Trajektorie
Nicht alle Lösungen für das Polynom 7. Ordnung erfüllen dieses Kriterium.
Bei Torsionswinkel-Vorsteuerung wird die Manipulation der Trajektorie aus der Beschleunigung berechnet. Das Bewegungsgesetz muß mindestens ruck-begrenzt sein damit kein Positions-Sprung vorgegeben wird. Soll in der Reglerkaskade eine Drehzahl-Vorsteuerung umgesetzt werden, ist die Ableitung zu bilden. Daher sollte das Bewegungsgesetz besser ruck-frei sein, damit kein Drehzahl-Sprung vorgesteuert wird. Für die Strom-Vorsteuerung der Motormasse muß die Manipulation ein weiteres mal differenziert werden. Idealerweise wählt man ein stoss-freies Profil nach folgendem Vorbild:
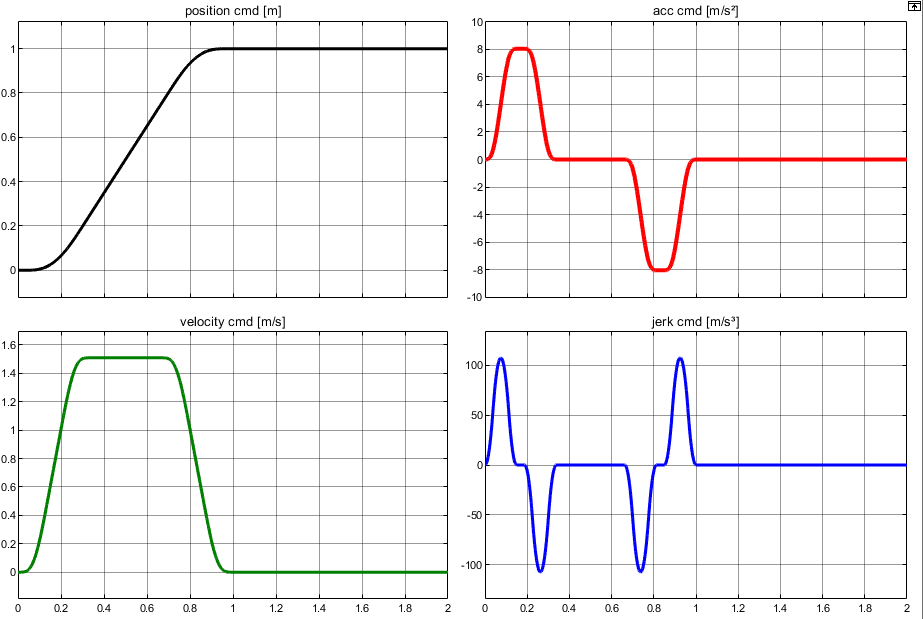 JOUNCE-FREE-TRAJECTORY
JOUNCE-FREE-TRAJECTORY
26.02.2018
Roland Fetzner