Aperiodisch in die Zielposition
Das hier vorgestellte Verfahren für aperiodische Positionierung ohne Überschwingen eignet sich für Applikationen, die über das Positionsfenster durchschwingen (overshoot) und deshalb das Erreichen des Positionsfensters verzögert ausgegeben wird. Diese Problematik tritt häufig ein, wenn
- die Trajektorie (Bewegungsprofil) keinen Verschliff liefert (Dreieck & Rampen) und
- die Serienstreuung der Mechanik so groß, dass kein gemeinsamer Parametersatz gefunden werden kann, der mit allen gefertigten Teilen zurechtkommt.
- die Applikation bei hoher Verstärkung im Drehzahl- und Lageregler Brumm-Neigung ( = Kreischen ) zeigt.
- herkömmliche Kaskaden-Regelung trotz Vorsteuerung nicht das gewünschte Ergebnis liefert.
- Low-Cost Komponenten verwendet werden, die eine geringe Auflösung haben und deshalb keine hohen Verstärkungen möglich sind.
- schlechte Massenanpassung
Wenn es aber auf jede Millisekunde [ms] ankommt ?
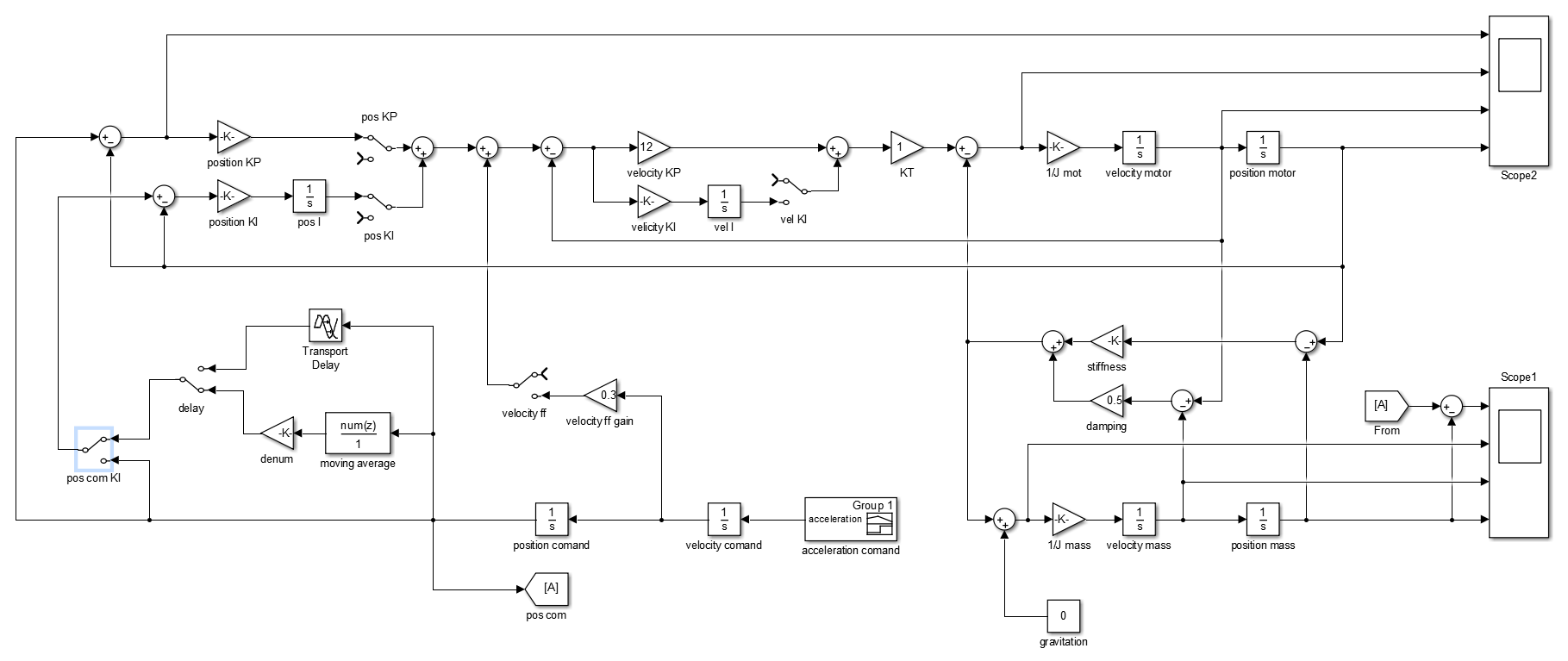
Zunächst werden Drehzahlregler und Lageregler der Kaskade wie gewohnt optimiert. Dann wird der I-Anteil vom Drehzahlregelkreis in den Lageregelkreis verschoben. Das ist insbesondere bei Servo-Verstärkern sinnvoll, die Lage- und Drehzahlregelung in der gleichen Abtastrate rechnen.
 Aperiodisch in Zielposition ohne Sollwertverzögerung Kaskade
Aperiodisch in Zielposition ohne Sollwertverzögerung Kaskade
Simulation ohne Sollwert-Verzögerung im I-Anteil:
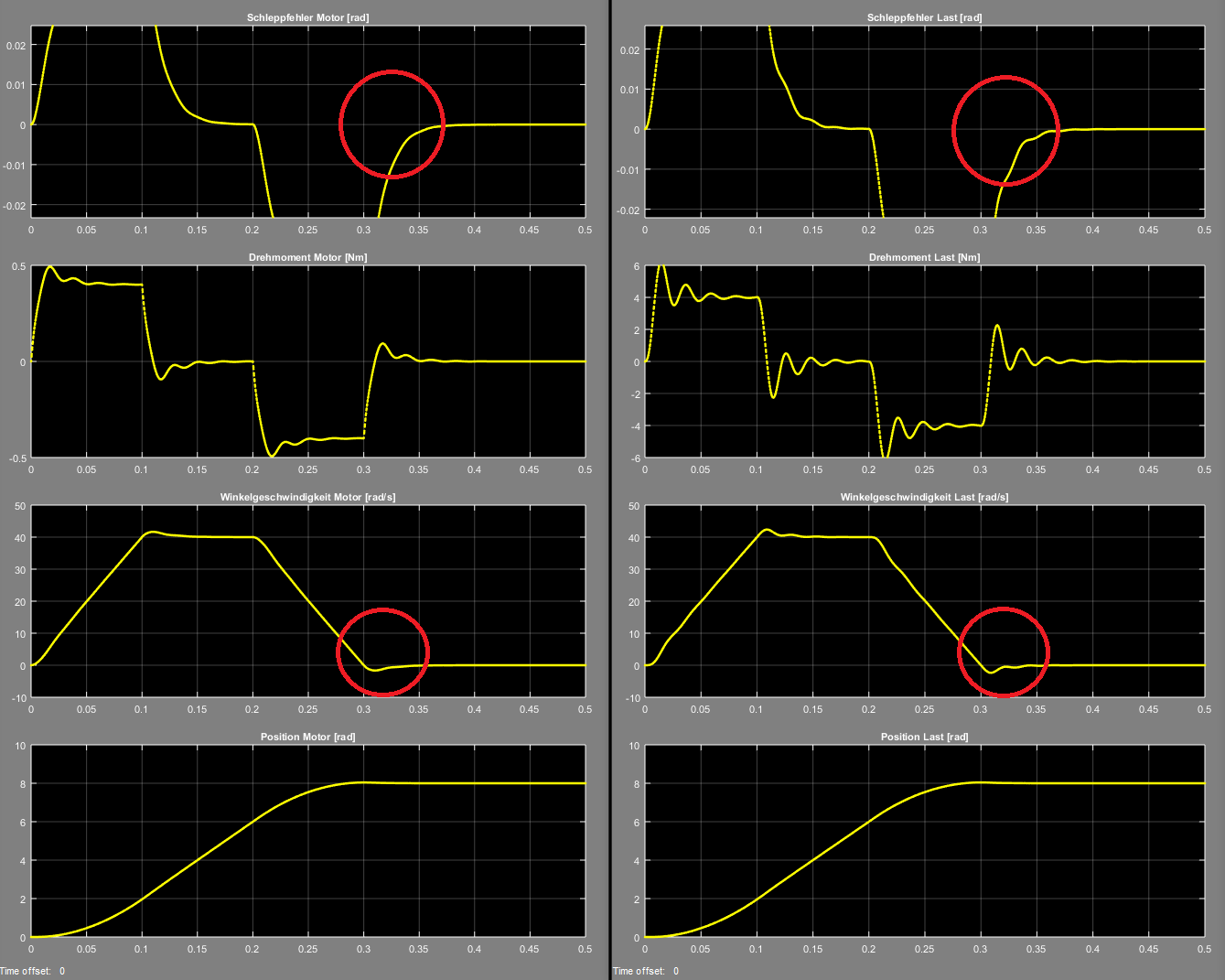 Aperiodisch in Zielposition ohne Sollwertverzögerung Simulation
Aperiodisch in Zielposition ohne Sollwertverzögerung Simulation
Durch eine Sollwert-Verzögerung im I-Anteil (Totzeit oder gleitende Mittelwert-Bildung) wird der Schleppfehler unipolar. Hier im folgenden Beispiel, nimmt der Schleppfehler nur positive Werte an:
 Aperiodisch in Zielposition mit Sollwertverzögerung Kaskade
Aperiodisch in Zielposition mit Sollwertverzögerung Kaskade
Simulation mit Sollwert-Verzögerung im I-Anteil:
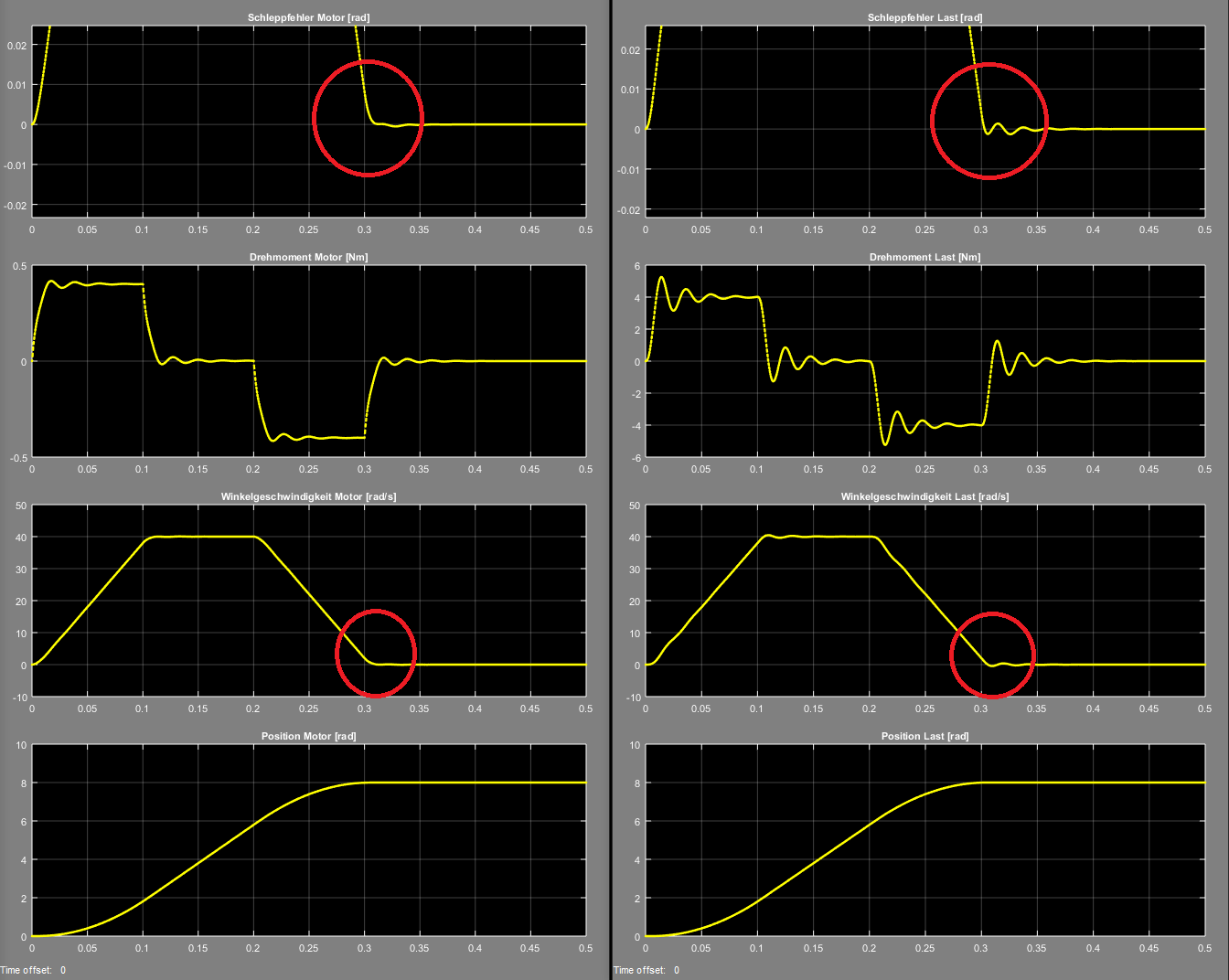 Aperiodisch in Zielposition mit Sollwertverzögerung Simulation
Aperiodisch in Zielposition mit Sollwertverzögerung Simulation
Wird ein gleitender Mittelwertbildner für die Sollwertverzögerung verwendet, so sollte man zunächst die Verzögerung so wählen, dass der Schleppfehler beim Erreichen der Ziel-Position leicht negativ wird (überschwingt). Jetzt wird über die Vorsteuerung das gewünschte aperiodische Einschwingverhalten eingestellt.
Beispiel-Applikationen:
- SORTER für ICs und Prozessoren (Zahnriemenachse zum Sortieren getesteter ICs in Abhängigkeit ihrer Qualität)
- PERFORIERUNG an Papierbögen zB: Überweisungsvordrucke, Tickets usw. (Vorschubwalze mit Riemen-Vorgelege)
- STOP und GO - SCHERE für Würstchen
Hinweis:
Das Verfahren kann bedingt bei sehr niederfrequenten 2-Massen-Systemen mit Dämpfung (> 0,5) angewendet werden, weil die Drehzahl des Motors kurz vor Erreichen der Zielposition NICHT überschwingt und damit der Schleppabstand des Motors zuzüglich des Torsionswinkels (bzw. Dehnung der Elastizität) - dh. die Position der Last - noch vor der Zielposition liegt und das Positionsfenster (auch von der Last) nicht überfahren wird.
Download SIMULINK-MODEL:
aperiodic_position_mode_06.slx
28.04.2019 Roland Fetzner