Torsionswinkel-Vorsteuerung mit PT1-Glied
Vorwort des Autors:
Wenn Sie sich - wie ich - schon jahrelang mit der Regelung von Zwei-Massen-Systemen befassen und schon unzählige Veröffentlichungen zum Thema studiert haben, dann wird Ihnen dieser Ansatz wohl zu banal vorkommen und es zunächst nicht glauben wollen, dass die Lösung so einfach ist.
Trajektorie-Manipulation über die Torsionswinkel-Vorsteuerung mit PT1-Glied:
Die Torsionswinkel-Vorsteuerung mit PT1-Glied ist eine wirksame Methode die Schwing-Neigung der Lastmasse enorm (nahezu vollständig) zu reduzieren. Sie ist einfach zu parametrieren ohne jegliches Experten-Wissen.
Modell der Simulation eines 2-Massen-Schwingers mit Manipulation der Trajektorie über die Torsionswinkel-Vorsteuerung mit PT1-Glied:
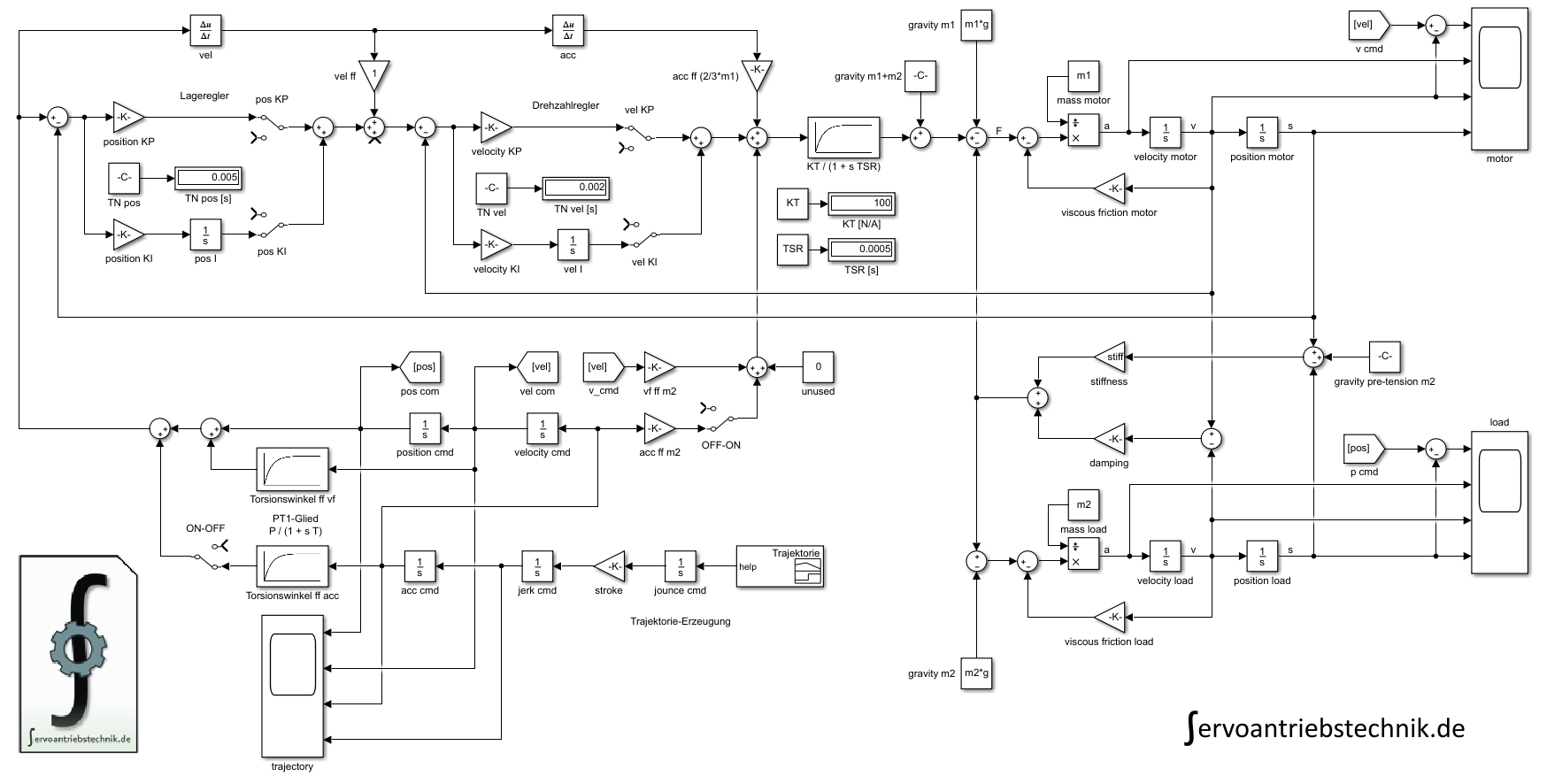 Torsionswinkel-Vorsteuerung mit PT1-Glied
Torsionswinkel-Vorsteuerung mit PT1-Glied
Vorteile der Torsionswinkel-Vorsteuerung mit PT1-Glied:
- Im Vergleich zum 2-Massen-Beobachter deutlich weniger Parameter. Es sollte lediglich das externe Trägheitsmoment und die Steifigkeit annähernd bekannt sein
- Die Basis-Trajektorie - auf der sich später die Last bewegt - muss ruckfrei sein. (siehe Beispiel folgend)
- Der Torsionswinkel wird aus der Beschleunigung der Basis-Trajektorie berechnet und über das PT1-Glied mit der ÜF = P / (1 + sT) verzögert:
- Die Proportional-Verstärkung PPT1 = Lastmasse / Steifigkeit
- Die Zeitkonstante = ZMS-Systemzeit TPT1 = Dämpfung / Steifigkeit
- Kennt man die Lastmasse und die Steifigkeit nicht, kann aus der Eigenfrequenz (die eliminiert werden soll), die P-Verstärkung berechnet werden:
- Eigenfrequenz 1-Massen-Schwinger der Lastmasse: Proportional-Verstärkung PPT1 = 1/(2π*fEMS)²
- Gibt es eine bekannte viskose Reibung an der Lastmasse, so kann aus der Geschwindigkeit der Basis-Trajektorie ein zusätzlicher Winkel (ebenfalls verzögert mit PT1-Glied) vorgesteuert werden:
- Die Proportional-Verstärkung PPT1 = viskose Reibung Lastmasse / Steifigkeit
- Die Drehzahlvorsteuerung (im Standard-Servo-Drive mit Kaskaden) dient der Entlastung des Lagereglers
- Strom-Vorsteuerung für die Lastmasse folgt der Beschleunigung der Basis-Trajektorie
- Die Strom-Vorsteuerung der Motormasse folgt der manipulierten Trajektorie
- In der oben abgebildeten Simulation wurde die Einstellung der PI-Regler nach dem symmetrischen Optimum umgesetzt.
- Motormasse muss nur annähernd bekannt sein
- Motor-(Schlitten)-Reibung muss nicht bekannt sein (wird von Kaskade ausgeregelt)
- Die Torsionswinkel-Vorsteuerung mit PT1-Glied kann auch in der übergeordneten Steuerung gelöst werden, da nur der manipulierte Lage-Sollwert + Strom-Vorsteuerung über den Bus zum Regler zu senden sind.
- kein schneller Task zur Berechnung notwendig
- verändern sich Trägheitsmoment oder Steifigkeit (bzw. Eigenfrequenz) des realen Systems in Abhängigkeit der Position oder der Position anderer Achsen, so kann die Torsionswinkel-Vorsteuerung im Betrieb evtl. nachgeführt werden.
Nachteil der Torsionswinkel-Vorsteuerung:
- eliminiert nur die Schwingungen, die durch die Beschleunigung / Bremsung hervorgerufen werden (Ansatz hier: Schwingungs-Vermeidung keine Schwingungs-Dämpfung)
- Schwingungen die durch Laststöße angeregt werden, kann diese Methode nicht bedämpfen.
- aktives Ausregeln der Lastposition im Stillstand bei externer Störgröße (Kraft bzw. Drehmoment) an der Lastmasse ist nicht möglich. Das lässt sich nur mit dem Observer lösen, sofern der Motor diese überhaupt registriert (wenn die Störung an der Lastmasse < statische und viskose Reibung Motorschlitten).
Trajektorie:
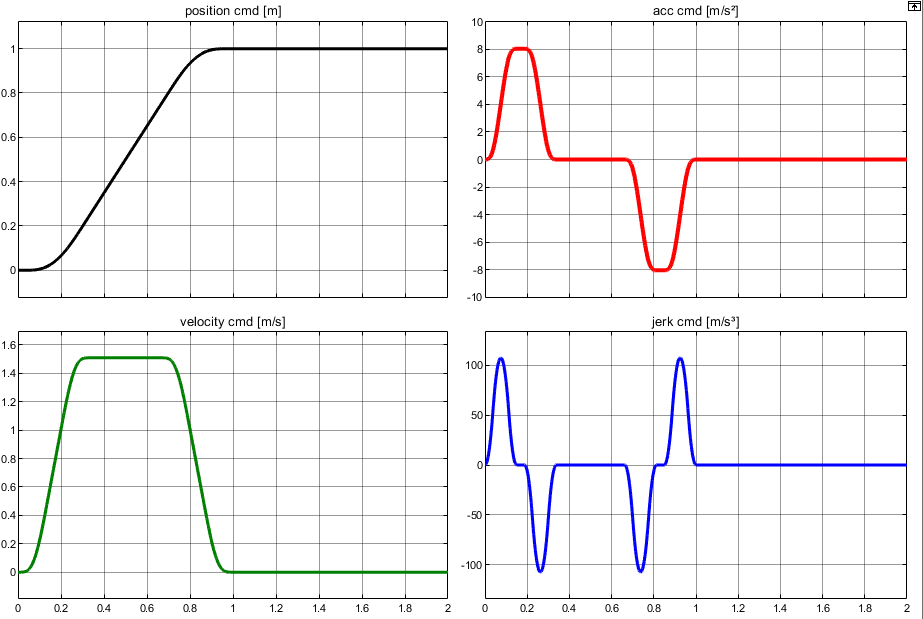 JERK-FREE-TRAJEKTORY
JERK-FREE-TRAJEKTORY
Hinweis ©:
Der Lösungsansatz "Trajektorie-Manipulation über Torsionswinkel-Vorsteuerung mit PT1-Glied" ist geistiges Eigentum vom Autor (Roland Fetzner Servoantriebstechnik.de) und darf ohne schriftliche Genehmigung nicht vervielfältigt und verteilt werden. Bitte wenden Sie sich an: servoantriebstechnik@web.de
Simulink-Modell auf Anfrage.
Ausblick:
Aufbauend auf die Lösung mit PT1-Glied, lassen sich folgende Themen weiterentwickeln:
- nicht lineare Steifigkeit (Sättigung oder Getriebekennlinie)
- bekannte positionsabhängige Kräfte an der Last
- Reibkennlinien & Lose
- Feedback-Verzögerung (Filter in der Drehzahl-Rückführung)
Bitte wenden Sie sich an servoantriebstechnik@web.de
CAM-Designer:
Für die Erzeugung einer "flachen" Basis-Trajektorie steht folgendes Tool zum download bereit:
Jounce Free Trajectory V1.03.xlsm
Jounce Free Trajektory 1080 Stützstellen.txt
Der CAM-Designer liefert folgendes Ergebnis für 1/3 Teilung:
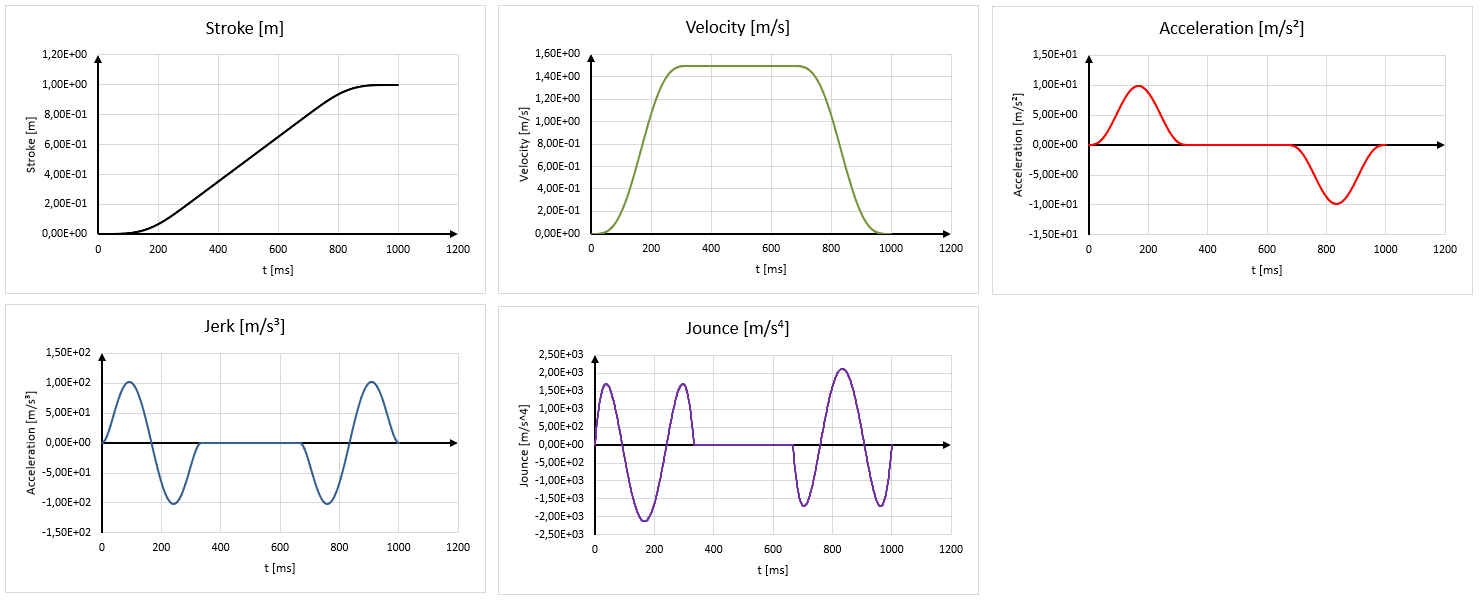 Jounce Free Trajectory V01.01
Jounce Free Trajectory V01.01
24. Mai 2023
Roland Fetzner